In this blog post, Ian Pierce reflects on some of the innovations in aerial survey introduced during his recent fieldwork in the Kyrgyz Tien Shan.
Earthquake geology and tectonic research increasingly rely on high resolution imagery and topographic data to improve understanding of active faults and earthquake ruptures. Often, airborne lidar data are used, however lidar can be cost prohibitive and time intensive to acquire. A low budget alternative to lidar that has emerged in the last decade is to use structure-from-motion (SfM) software to reconstruct the 3D geometry of a region using many overlapping photographs captured from either a UAS (uncrewed aerial system), satellite, or even from the ground. While UAS based SfM surveys can be labor intensive to collect and may require significant computing power to process large areas, they provide a level of detail and quality of image that allow for new insights into fault systems.

Most SfM algorithms determine the locations photographs were taken from (‘camera locations’) by automatically detecting and matching points between overlapping photographs. It then uses these camera locations to reconstruct the distances and angles between each point in the scene using the photogrammetric principle of parallax. To scale the scene in real world coordinates then requires known points on the ground surface that can be located in the photographs, called ground control points (‘GCPs’). These GCPs are often brightly colored targets that are surveyed manually with a dGPS system. Typically a survey will use at least five or six and sometimes more than several dozen GCPs to provide an accurate scale. Placing and measuring these GCPs in the field is labor intensive and frequently impossible if the area is inaccessible by foot.

However, if the camera locations are precise, and known to the SfM software, then the geometry of the scene can be reconstructed with much higher accuracy, and in an idealized world without the need for any GCPs. To do this requires precise positioning of the UAS – and this can be achieved by using a dGPS system on the UAS. Perhaps then not surprisingly, dGPS equipped UAS’ are increasingly being used for high accuracy surveying.

A differential GPS (dGPS) system uses two GPS receivers. One is stationary and averages its location over several hours (the ‘base’), while the second moves and is used for measurements (the ‘rover’). At each instance (typically from 1-5 hz), the base’s error is assumed to be the vector defined by the difference in 3 dimensions of the base’s location in that instance compared to its location averaged over the entire observation period. If the errors of the two instruments are assumed to be the same at each instance, then this error for the base can be applied to the rover, greatly reducing its location uncertainty (typically from >5-10 m to <1 cm).

A large part of our project in Kyrgyzstan is to purchase equipment and provide training for our collaborators at the Kyrgyzstan Institute of Seismology (KIS) in Bishkek. For this aim, vehicles, drones, dGPS, powerful computers, a generator, and other equipment were purchased for the KIS that were used in the summer 2021 field campaigns.

We purchased a pair of Emlid Reach RS2 GPS receivers that work together as a dGPS system. We decided to use the proven DJI Phantom 4 Pro v2.0 system due to the widely available parts, batteries, and our experience with it. While a dGPS equipped Phantom 4 is commercially available, it is considerably more expensive than the standard Phantom 4. Instead, we chose to use the Teokit system by Vanvara Digital.
Installing the Teokit is a bit nerve wracking and involves disassembling most of the Phantom drone to install a series of chips, and includes unsoldering and resoldering onto circuit boards. The first chip holds an improved GPS antenna for the drone (the black tower on top of the drone visible in some of the photos). The second chip is wired into the camera’s shutter circuit to record the precise time that a photograph is taken, and third chip controls both of these other chips and logs both the GPS and time stamp data.

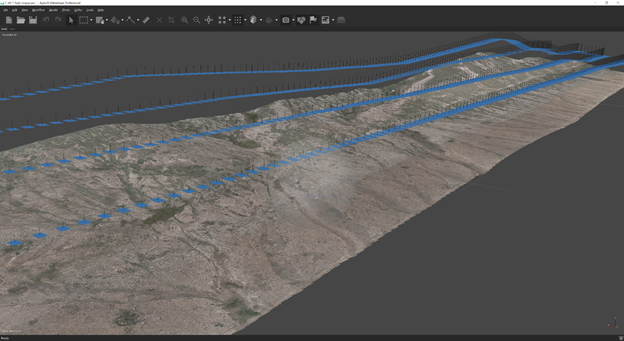
The teokit (‘teodrone’) works by logging the precise time a photo is taken and the full continuous GPS signal that is received by the GPS receiver on the drone- for a 20 minute flight this is about 25 Mb of data, in addition to several hundred photos. The GPS track is then corrected in post processing (PPK, post processed kinematic) against the base station that was setup during the survey. The timestamps are then used to extract GPS locations at the precise time each photo was taken. Finally this series of timestamped locations is matched to the photos that were taken, to provide highly accurate (<5 cm) photo locations. These corrected photos are then used in a SfM photogrammetry software to reconstruct the earth’s surface.

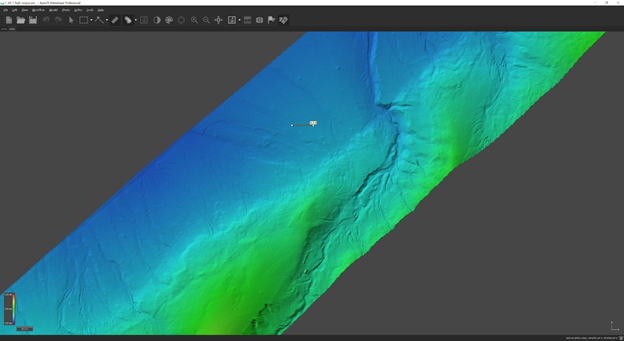
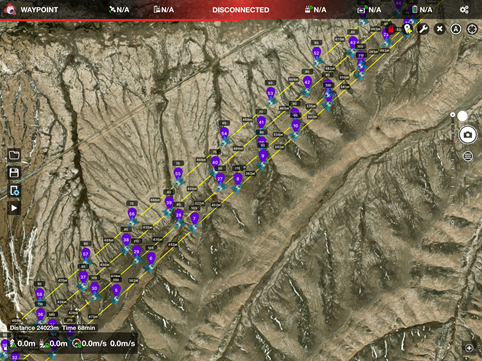
In Kyrgyzstan, we typically flew the UAS’ at ~150-250 m altitude, at a velocity of ~7.5 m/s, and collected photos every two seconds. We used the Litchi iPad app to provide an autopilot for each drone, with flights planned using Teodrone’s browser based Teofly flight planner. After some preliminary testing in Oxford, we determined that accuracy was satisfactory using a single GCP, and differences between dGPS points and those in the model were typically <40 cm horizontal & vertical (however dGPS measured points have their own uncertainty, but that is a different story). So in Kyrgyzstan, we used the base station as a single GCP, and did not survey any additional points. We typically were flying two drones at a time and were able to collect ~5-10 km2 of images per day, depending on weather, road access, and topographic conditions. We used a gasoline generator to charge the drone batteries so that we could fly nearly continuously (we had 11 total batteries on this trip). A typical day’s survey results in a SfM point cloud with several hundred million individual points. Finally, the resulting orthoimage resolutions are ~5-10 cm/pixel, and DEM resolutions are 10-20 cm. From the two months of work we conducted in summer 2021 we produced ~420 Gb of photos alone, which will roughly double in file size when the SfM processing is finished.

This equipment combined with the workflow outlined above provides a very powerful tool for research in active faults and tectonics. Along with our Kyrgyz partners we are now able to conduct surveys of faults throughout the country with a cost effective, highly portable, and efficient UAS system. The data we collect provide a never-before-seen picture of the effects that earthquakes have on the landscape.